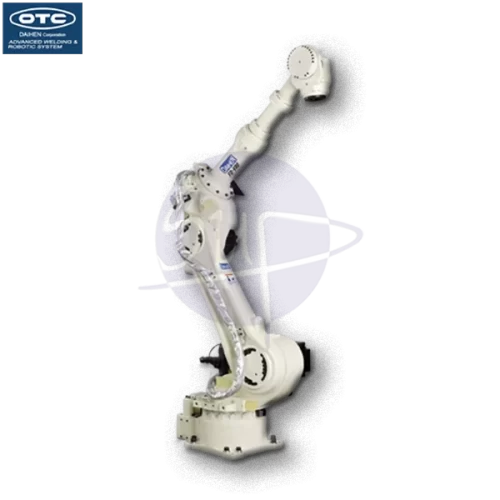
is a state-of-the-art 6-axis robotic arm engineered for high-precision arc welding applications.With an impressive reach of 2.008 meters and a payload capacity of 6 kilograms, the FD-B6L is designed to deliver exceptional performance in complex welding tasks, especially in confined or hard-to-access areas.
Key Features:
Extended Reach:The FD-B6L offers a long reach of 2.008 meters, enabling it to handle large workpieces and access tight spaces with ease.daihen-robot.com+7OTC Daihen+7daihen.mx+7
High Precision:With a positional repeatability of ±0.05 mm, this robot ensures consistent and accurate welds, reducing the need for rework.Integrated Cable Routing:The through-arm coaxial cable design minimizes interference and enhances wire feeding, contributing to improved weld quality.
Compact and Slim Design:The robot’s slim profile and reduced footprint allow for high-density installations, making it suitable for facilities with limited space.
Enhanced Speed and Efficiency:The FD-B6L boasts faster movement on its base axes, leading to reduced cycle times and increased productivity.
The FD-B6L is ideal for a variety of applications, including:
Arc Welding:Its precision and reach make it perfect for MIG, TIG, and other arc welding processes.
Material Handling:Capable of handling components up to 6 kg, it can assist in the movement and positioning of parts.
Automotive and Industrial Manufacturing:Suitable for welding tasks in automotive assembly lines and other industrial manufacturing settings.
Advantages:
Improved Productivity:Faster cycle times and high precision lead to increased throughput and reduced operational costs.daihen-robot.com
Space Efficiency:Its compact design allows for installation in areas with limited space, maximizing floor utilization.
Enhanced Weld Quality:Integrated cable routing and precise motion control contribute to superior weld finishes.otc-daihen.com+1otc-daihen.com+1
Versatility:Suitable for a wide range of welding applications across various industries.
In summary, the OTC FD-B6L Arc Welding Robot combines extended reach, high precision, and a compact design to deliver exceptional performance in demanding welding applications.Its advanced features and versatility make it an invaluable asset for industries seeking to enhance their welding operations.
Digital inverter TIG welding machine with automatic synergy function, up to 300A current, compact design, ideal for mild steel, stainless steel, and nickel alloys.